 |
 |
Research Project P3:
Miniature SLAM system for 3-D Simultaneous Localization and Mapping
Research Project Goal
Build and develop a miniature system for 3-D environment modeling,
localization and navigation. In recent years, 3-D modeling of
environment has become vastly popular in the robotics
community. However, today's best methods all use heavy and expensive
sensors, which are prohibitive for many applications. Recently, we
have received a new range
finder by Hokuyo which is significantly smaller and energy
efficient. The goal of this project is to develop a full 3-D modeling
method that uses this sensors to build 3-D environment models, and
then cross-references such models for robot navigation.
Research Project Scope
The idea is to use a miniature range finder, build a server for 1-D actuation, and mount it on a moving platform to acquire 3-D models. Then build software for acquiring 3-D point clouds, and for matching them using a variant of the ICP (iterative closest point) algorithm. Use this software to perform simultaneous localization and mapping, or SLAM.
Data
Image of the sensor (image (c) Hokuyo):

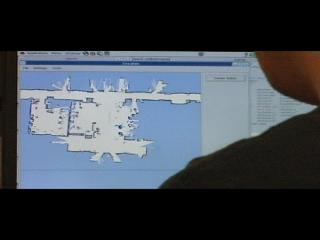
You can see the sensor in action in these two movies:

Tasks
- Build actuation platform for the sensor using servo motor and shaft encoder (requires hardware skills!!!)
- Program computer interface for data acquisition; develop 3-D visualization software
- Implement scan matcher (ICP) for SLAM
- Experiment in the physical world.
Research Project Status
student names here
Point of Contact
Sebastian Thrun
Midterm Report
not yet submitted
Final Report
not yet submitted
|
 |
|
|

