


Locating Moving Entities in Dynamic Indoor Environments with Teams of Mobile Robots
Matthew Rosencrantz, Geoffrey Gordon, and Sebastian Thrun
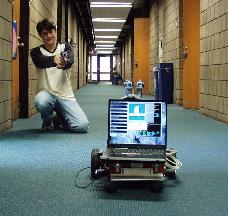 This article presents an implemented multi-robot system for playing
the popular game of laser tag. The object of the game is to search for
and tag opponents that can move freely about the environment. The main
contribution of this paper is a new variable-dimension particle filter
algorithm for tracking the location of opponents under prolonged
periods of occlusion. This algorithm can cope efficiently with
variable numbers of opponents, through mechanisms that dynamically
increase and decrease the number of particle tracks. When searching
for opponents, the individual agents greedily maximize their
information gain, using a negotiation technique for coordinating their
search efforts. Experimental results are provided, obtained with a
physical robot system in large-scale indoor environments.
This article presents an implemented multi-robot system for playing
the popular game of laser tag. The object of the game is to search for
and tag opponents that can move freely about the environment. The main
contribution of this paper is a new variable-dimension particle filter
algorithm for tracking the location of opponents under prolonged
periods of occlusion. This algorithm can cope efficiently with
variable numbers of opponents, through mechanisms that dynamically
increase and decrease the number of particle tracks. When searching
for opponents, the individual agents greedily maximize their
information gain, using a negotiation technique for coordinating their
search efforts. Experimental results are provided, obtained with a
physical robot system in large-scale indoor environments.
Videos and animations:
- lasertag-video.avi: Video sequence of an early expperiment
- lasertag-samples.avi animation of the samples in this experiment
-
lasertag-video.avi: Video sequence of experiment with 2 robots
lasertag-samples.avi animation of the samples for 2 robots
Special thanks to Andy Rubin for encouraging us to work on robotic paintball
The full paper is available in gzipped Postscript and PDF
@UNPUBLISHED{Rosencrantz02a,
AUTHOR = {Rosencrantz, M. and Gordon, G. and Thrun, S.},
TITLE = {Locating Moving Entities in Dynamic Indoor Environments with Teams of Mobile Robots},
YEAR = {2002},
ORGANIZATION = {Carnegie Mellon University},
ADDRESS = {Pittsburgh, PA},
NOTE = {Submitted for publication}
}