 |
 |
Project P3:
Classifying Outdoor Camera and Range Images
Project Goal
The objective of this project is to analyze camera and range images for the presence of vegetation, built structure, vehicles, and so on. A simplistic approach is illustrated in the following Figure, showing classified range images taken from the Stanford Helicopter:
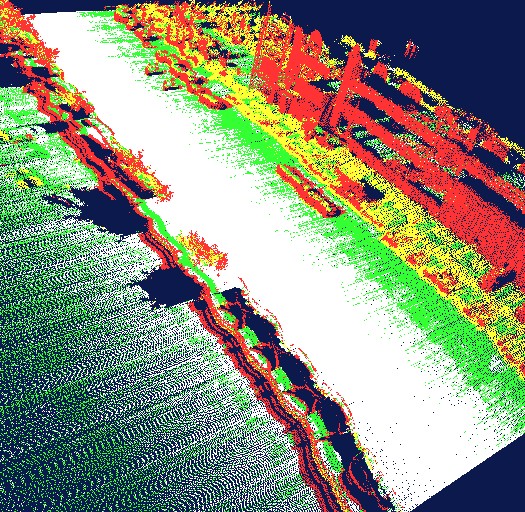
Figure 1: Range map with individual range measurements classified into four bins: flat paved road (white), grass (green), built structure (red) and unknown (yellow).
In this project, we hope to use range and camera images of outdoor
scenes as the basis for classification. The goal is to separate
vegetation from buildings, vehicles, and other types of objects and
structures found outdoor.
Project Scope
This project involves taking and analyzing range and camera images. most
likely, we will use an existing SICK laser range finder for range image acquisition, and an existing Canon camera for the camera images. To line up those range images, the camera has to be calibrated relative to the range image, and the offset has to be compensated. There are multiple options for classifying the composite images: using statistical techniques, we can train a local classifier for small image patches, and then use an Ising model to segment the image into smooth regions. For training, it will then be necessary to label images by hand.
Tasks
The project will be accomplished through the following tasks.
- Task 1: Camera calibration
- Task 2: Local classification of composite image patches (range and camera).
- Task 3: Classification by relaxing the local classifications into a global image segmentation
- Task 4: Visualization, in VRML or similar.
- Optional: Assist a robot to make decisions as to what terrain can be navigated (e.g., tall grass versus rock)
You will be working closely with the Stanford Robot Learning Lab,
which possesses robots equipped with the appropriate imaging equipment.
Members of the lab will assist you in collecting the data.
Project Status
Jeff Michels and
Kayur Patel
Point of Contact
Sebastian Thrun
Midterm Report
not yet submitted
|
 |
|
|

