
Project Goal
To build a globally consistent map from data collected by a mobile robot using range images. When someone buys or leases the ASIMO humanoid robot, it is desirable for the robot to localize and build a map of the environment automatically using its sensors. This will permit the execution of navigation tasks in unknown environments.

Project Scope
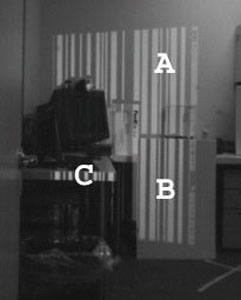
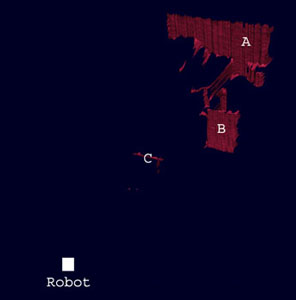
A Nomad mobile robot with an on-board structured light system which will be used for this project. An active structured light method is used to recover depth. For this project the range images will be provided to you. The images below show a sample image from the onboard camera, as well as a reconstructed polygonal model.
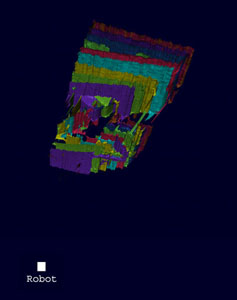
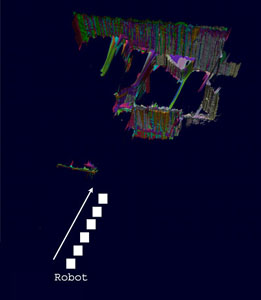
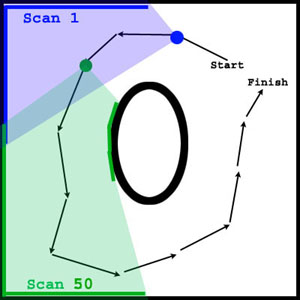
The range data will be provided as PLY files sampled at multiple positions, e.g. every 1 inch, as the robot moves around a 6 meter table. The figure below shows this motion schematically. Also shown are a set of raw range images obtained as the robot moves in along a path. In the first figure this data has not yet been aligned, and the motion of the robot is unknown. Each recovered range image is shown in a different color. The middle figure shows the situation after the data was manually aligned to be locally consistent. In this project your goal is to automatically build a globally consistent map, and localize the robot with high precision.
Ground truth on starting and ending position will be available as well as odometry from the mobile robot at each location. Data will be available for continuous motion with constant velocity as well as stopping the robot at each picture location for experimentation purposes.
Tasks
- Task 1: Load and visualize the range data. Code for reading the PLY format, and viewing meshes is available.
- Task 2: Filter outliers and implement a technique like ICP to align the range scans with their neighbors. This alignment will provide an estimate of the motion of the robot between measurements.
- Task 3: Build a map of the environment which is locally consistent but not necessarily globally consistent.
- Task 4: Build a globally consistent map, possibly combining evidence from both range and odometry sensor data.
- Task 5: Test accuracy of the system by comparing starting and ending position to ground truth. The complete system should be more accurate than either odometry alone, or locally aligned range images alone.
Project Status
James Diebel and Kjell Reutersward, one slot still open
Point of Contact
James Davis jdavis@honda-ri.com
Rakesh Gupta rgupta@honda-ri.com
Midterm Report
submitted
Final Report
submitted
